Messungen der LRK350-20-13 im Flug am 23.9.2001
Da wir den schönen und und sehr leichten DataLogger haben, der "direkten Draht"
zum SPEEDY-BL Controller
hat, war es einfach einige Steigflüge mit der ASW24 zu machen.
Der "direkte Draht" besteht aus 5 Signalleitungen die
direkt aus dem SPEEDY-BL über den unteren Stecker die Information
bereitstellt. Die Drehzahl wird als die 3-Phasen Felddrehung
gemessen, somit liegt die Frequenz bei dem LRK350-20 7
mal höher und somit 7 mal genauer, als die Luftschraubendrehung
selbst.
Gemessen wurden mit einer Genauigkeit von 14 bit:
Der DataLogger erlaubt auch die Fluggeschwindigkeit zu loggen,
aber da wir nur energetische Betrachtungen anstreben (Antriebseffizienz),
haben wir den Speed-Sensor nicht befestigt, den ich für
Messungen der Polaren normallerweise nehme.
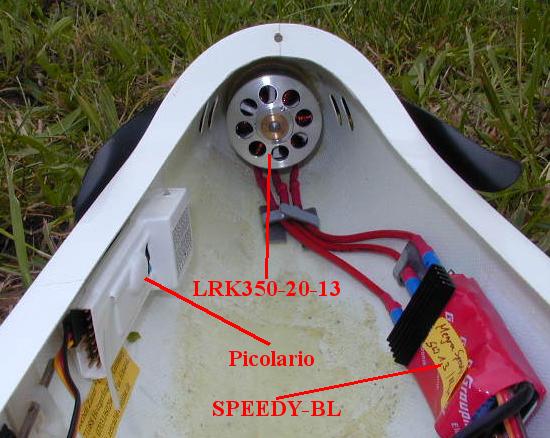
Die ASW24 hat eine Spannweite von 3,14m und wiegt 3,3kg. Als
Energiespender dienten 10 Zellen Akkus. Die Plazierung des Motors
LRK350-20-13 und des Controllers stellt in dem großem Rumpf
keine Probleme dar. Die Luftschraube war eine Aeronaut 15x8.
Auf dem Bild ist noch der Picolario sichtbar. Dort wurde der
DataLogger befestigt.
Wir sind gegen 16 Uhr geflogen bei ziemlich windigen Wetter
auf einer großräumige Wiese. Nach dem ersten Steigflug
kann man schon ein bisschen Thermik sehen (90-120s). Beim zweiten
Sinkflug bei ca 540s, hat Jochen richtig angestochen, ganze 70m.
Eine wichtige Zahl ist die Sinkleistung von ca -0,95m/s. Diese
Zahl brauche ich später, um die Steigleistung zu beurteilen.
Interessant ist die Akkuspannung und der Motorstrom.
Da der erster Steigflug mit 5m/s nach oben ging sollen wir
us noch den Steigflug genauer anschauen ob dort nicht ungewöhnliche
Phasen vorkommen.
Dank dem Piloten war der Steigflug sehr gleichmäßig,
keine Akkuenergie vergeudet für Strömungsabrisse. Der
zweite Steigflug zeigt das mittlere Steigen von 4m/s
Der dritte Steigflug:
Beim vierten Steigflug haben wir, speziell auf mein Wunsch
hin, die Teillast bei 15A und 22A untersucht (siehe Stromdiagramm).
Vollgas Steigflug benötigt 35A. Die Teillast bespreche ich
hier nicht. Wir widmen uns dem mittleren Steigflug Nummer 2.
Wir nehmen die Phase zwischen 320s und 380s also 1 Minute
lang.
Der Höhegewinn ist:
H=h(380)-h(320)=243,5-7,5=236m
Das 3,3kg schwere Modell hat also eine Potential Energie erreicht:
Ep=m*g*H=3,3*9,81*236=7.640 Joule oder
Watt-Sekunden
In der gleichen Zeit ist das Modell mit seiner Sinkgeschwindigkeit
von -0,95m/s gesunken und hat zusätzlich Potential Energie
vernichtet.
Es=m*g*T*v_sink=3,3*9,81*60*0,95=1.845
Joule
Der Antrieb hat in das Modell innerhalb von 60s eine Energie
von
E=Ep+Es=7.640+1.845=9.485 Joule
reingebracht. Die Frage ist, wie viel Energie hat der Antrieb
aus dem Akku bezogen?
Dafür müssen wir nur das Integral über die
60s von von 320s bis 280s von U*I berechnen.
Aus dem Akku wurden
E_bat=Sum(U*I)=21.361 Joule (Volt*Amp*Sekunden)
Jetzt kann die Effizienz über alles
gerechnet werden: von dem Akku, über den Controller, Motor,
Luftschraube, über das Modell bis zu gewonnen Höhe.
Eta=E/E_bat=9.485/21.361=0,444=44%
So ein hohes Eta ist mir persönlich noch nicht vorgekommen,
obwohl ich einige Antriebe schon vermessen hatte und Leistungsmodelle
baue. Diese hohe Zahl kommt auf einige Aspekte zurück:
Ich werde hier nicht Euch langweilen mit den anderen Steigflügen
und dem zweiten und dritten Akku. Insgesamt 12 Steigflüge!
Die Effektivität bei dem ersten Steigflug war noch gering
höher. Über alles kann man schon sagen, daß der
Antrieb sehr effizient ist.
Am Ende vielleicht ein Bild der Spannung des Akkus, nicht
gegen die Zeit, sondern gegen die entnommene Energie (mAh). Die
grüne Linie Zeigt den Motorstrom zu dieser Zeit. Im vierten
Steigflug Teillast!
zurück
zu LRK-Hauptseite |