|
 |
Das ist der zweite SPEEDY, der schon vor einigen Tagen die schwere ASW27 mit dem LRK350-20-13 kraftvoll in die Luft gehoben hat. Da es sehr windig gewesen ist, haben wir auf die DataLogger-Messungen verzichtet. Die Telario-Talk Höhenangaben haben jedoch ca 20% mehr Steigung gezeigt, als bei Ultra 1300-10, bei gleicher Motorlaufzeit! Die Höhenkurven von einem Steigflug kommen, sobald Windstille herscht. |
Ich möchte hier keinen entmutigen, aber für den ersten Ausflug in die SMD-Technik eignet sich diese Aufgabe nicht. Für diejenigen, die schon was gebaut haben, hier einige Hinweise. Man benötig absolut (wegen der sehr kleinen Abstände zwischen den Bahnen):
Dann soll man sich absolut an die sehr gut gemachte Step-by-step Bauanleitung halten. Nämlich es geht nicht nur darum, daß Deine Lötarbeit nicht funktioniert, aber darum ob die, in der Schaltung erzeugte 15 V Spannung, nicht durch irgendwelche Lötkurzschlusse an den Prozessor gelangen und ihm zerstören. Es lohnt sich auch die verlöteten Bauelemente aus der Stückliste zu streichen. Die meisten Widerstände sind Bauform 0805, fein in Tüten verpackt.
Nichtdestotrotz habe ich für den ersten SPEEDY-BL, sage und schreibe, 11 Stunden gebraucht, obwohl ich ziemlich flink in dieser Materie bin und eigentlich nur 4-5 Stunden veranschlagt hatte. Die meisten Stunden habe ich verbraucht, um zu verstehen, was der Prozessor gerade so tut. Und warum, obwohl die EMK-Positionssignale, von dem durch die Hand gedrehten BL-Motor, richtig ankommen, der Motor doch nur stottert.
Fazit:
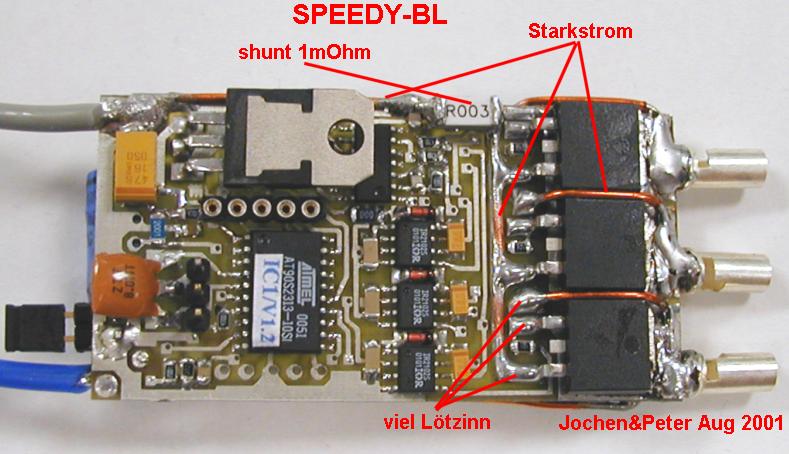
ohne Oszilograph hat man eine geringe Chance die Arbeit nicht zu verfluchen. Mit ihm geht es ziemlich klar voran. Um den Nachbauer ein Bisschen Hilfestellung zu geben, habe ich eines Samstags auf meinem Arbeits-Oszi (Agilent Infenion 1GHz) einige Bilder erzeugt, um die Arbeitsweise des Reglers zu beleuchten. Mit dem Verständnis, wie der Regler funktionieren soll, habe ich den zweiten SPEEDY, ohne die Bauanleitung zu befolgen (alle Bauteile auf einmal gelötet, bitte tue es nicht!) innerhalb von nur 3 Stunden fertig montiert und getestet (sehe oben verpackt und hier detailliert).
Reglerarbeitsweise bei Vollast
Das ist das Blockschaltbild, wie es auf der HomePage von Jo zu sehen ist:
Wenn der Motor dreht, entstehen 3 Positionssignale, sogenannte EMK-Signale. Sie zeigen dem Prozessor (Motor-Steuerung im Bild) die Position des Rotors. Auf dem Scope-Bilder, die unterste Kurve, violett.
Die Phasen A, B, C geben mit 120 Grad Versatz die Akkuspannung auf den BL-Motor weiter, wie sich in einer 3-Phasen-Ansteuerung gehört. Das sieht folgend aus: (Bitte klicke auf das Bild, wenn Du reinzoomen willst)
Um die Leitung der Phase A mit Minus zu verbinden, muss man die Gate des unteren MOSFETs (es gibt 6 MOSFETs in der 3-Phasen H-Brücke) mit 15 V ansteuern (gelbe Linie, Gate A):
Um diese schöne 3-Phasen-Spannungen zu erreichen sehen die MOSFET-Gates-Ansteuerungen folgend aus, (wieder draufklicken, wenn Du zeitliche Vergrößerung Dir wünscht)
Nun, das war wirklich einfach, nicht wahr? Jetzt kommt ein Bisschen komplizierter ...
Reglerarbeitsweise bei Anlauf und Teillast
Bei Anlauf kann man dem stehenden Motor nicht die volle Akkuspannung draufknallen. Sonst ist seine Wicklung sofort verbrannt. Der Controller muss sehr zaghaft eine sehr schwache Teillastansteuerung ihm anbieten und über die EMK-Signale nachschauen, ob der Partner sich überhaupt drehen will. Erst wenn die Positionssignale (EMK) richtig dem aufgezwungenem Drehfeld folgen, kann man das Drehfeld beschleunigen, Teillast reduzieren, um am Ende in die Vollast überzugehen. Somit ist die Teillast eine sehr wichtige und schwierige Aufgabe für den Controller (und auch für den Entwickler dessen). Bei Speedy-BL wird zusätzlich ein sogenannter Freilauf im Teillast realisiert, was dramatisch die Erwärmung des Controllers reduziert. Darüber reden wir hier aber nicht, um den klaren Gedankenfluß nicht zu stören.
(Manche kommerziellen Controller werden innerhalb 5 Sekunden an meinem LRK350-20-15 in der gleichen Teillast so heiß, das man sie nicht anfassen kann. Der Speedy bleibt "cool")
Aber kommen wir zurück zu der Teillast:
Da der BL-Motor bei Teillast weniger Strom bei gleicher Akkuspannung kriegen soll, müssen wir die schönen Rechtecke der Ansteuerung der MOSFETs (sehe oben) richtig zerhacken, damit im Schnitt die jeweilige Phase weniger Strom kriegt. Es sieht dann so aus (klicke drauf wenn Du reinzoomen willst):
Bei dieser Zerhackarbeit (engl. chopping) kriegt der BL-Motor, was er braucht - eben eine zerhackte Spannung, die aber weiter der Trapezform folgt:
Warum jetzt die EMK-Signalle nicht zerhackt werden, obwohl sie direkt von den Phasen A, B, C abgeleitet sind, bleibt ein süßes Entwicklergeheimniss (und auch meiner). Der Prozessor (Motor-Steuerung) wäre ziemlich ratlos, würde er eine zerhackte Position bekommen.
Ich hoffe, die mutigen Nachbauer dieser Schaltung werden jetzt wissen, wo welche Signale zu erwarten sind. Und das der Prozessor ganz "clever Burscher" sein muß, um in diesem Chaos der Signale, bei Feld-Drehzahlen die 50.000 rpm erreichen, noch nicht aus dem Tritt zu kommen.
Und hier bin ich, mit dem Speedy-BL:
 |
Peter arbeitet bei Agilent Technologies. Er entwickelt seit fast 20 Jahren Meßgeräte für die Medizin, chemische Analityk, Weltraumforschung und zuletzt für die optische Internet-Kommunikation. Er hat für Max-Plack-Institut, NASA (Jupiter Sonde "Galileo"), Hewlett-Packard Labs in Kalifonien etc. gearbeitet. Am wohlsten fühlt sich Peter, wenn es was zu messen, zu rechnen und zu entwickeln gibt, wenn er nicht gerade auf dem Flugfeld wieder einen Superbart erwischt hat. Ausgiebig Fahrrad fahren (100km), gehören genauso zu seiner Beschäftigung, wie LRK vermessen oder in rco unterwegs zu sein. |