|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
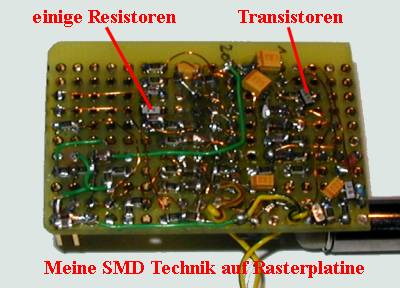 |
Das ist meine "High-Technology" von unten. Die Seite zeigt man normallerweise nicht! Aber... wer benutzt schon 2,5 mm Rasterplattinnen um einfach SMD Widerstände der Größe 0805 (2,0x1,25 mm) komfortable zu verlöten. Die Verbindungen werden mit einen dickeren Thermo-Draht gemacht. Die Seite wird mit einer 0,2 mm Gfk-Folie geschützt. Ein großer Vorteil diese Technik besteht darin, daß man innerhalb von Minuten Änderungen durchführen kann, wie z.B. den Controller Speedy-BL anzuschließen. |
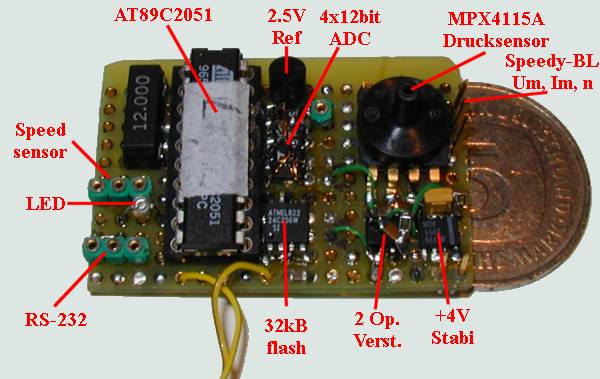
Die technischen Daten des Data Logger für die Motorenmessung:
Speziell die Drehzahlauflösung soll schon Einigermassen gut sein, da sie mit der 3-ten Potenz in die Rechnung eingeht. Die Daten werden "live" über die serielle Schnittstelle RS-232 zum Computer geschickt. Nach getane Motormessung werden sie dann im MATLAB bearbeitet.
Dieser Motor hat die niedrigste Drehzahl/Volt aber auch den größten Innenwiderstand von 36 mOhm. Die Daten hier wurden nicht mit dem Data Logger gesammelt, sondern stammen von den früheren Messungen mit klassischen Meßgeräten (Voltmeter, Ampermeter, Oszilograph). Leider stand mir für die Messungen nur ein 5-15 V, 30 A Netzteil zur Verfügung. Zwar habe ich auch 8, 10 und 12 Zellen Packs benutzt, aber die Messungen sind uninteressant, da nur eine Spannung repräsentiert wird.
Diagramme oder Tabellen?
Ich finde Diagramme wesentlich besser als Tabellen, da man sofort sehen kann, wie der Motor über einen Bereich der Spannung arbeitet. Man sieht sofort, ob die gedachte Zellenzahl ausreichend ist. Ob am Ende der Akkuentladung auch noch genügend Leistung vorhanden ist. Alle Messungen mit Aeronaut-LS.
Der wichtigste Graph: wie viel Leistung nimmt man mein Motor? Welche LS?
Jeder Kreis auf dem Graph ist eine vollständige, manuelle Messung.
.gif)
Auch interessant, wie groß ist der Strom bei 8 V und 18x11 Aeronaut LS.
.gif)
Viele Leute mögen Drehzahl-Angaben viel mehr als Leistung oder Strom. Wenn eine 14"x8" 5.500/min dreht, dann wissen sie sofort, das es gut zur Sache geht.
.gif)
Den letzten Graph benutze ich oft als kurze Überprüfung vor dem Flug. Man hat zu diesem Zeitpunkt keinen Zugang zum Strom und zur Spannung, um Leistung zu berechnen. Da ist eine einfache Drehzahlmessung mittels optischen Drehzahlmesser ganz hilfreich, um zu prüfen ob die Leistung in Ordnung ist.
.gif)
Dieser LRK350-20-13w ist gedacht eine ASW27 (3.800g) mit einer 14"x8" ausgestattet souverän in die Lüfte zu bringen. Am Sonntag 2.9.2001 ging die ASW mit einem Telario-Talk Variometer am Board in den Steigflug. Bei gleicher Akkulaufzeit der 10 Zellen erreichte dieser Gespann ca 20% mehr Steigleistung als der vorherige Motor, der Ultra 1300-10.
Dieser Motor wurde mit unterschiedlichen Aeronaut (a) und Graupner (g) LS mittels Data Logger vermessen. Die einzelnen Linie sind mit Zahlen, wie 14x08 versehen, um die Zuordnung zu erleichtern. Die Farben der Linien sind auf allen Graphs eines Motors gleich.
Jeder Kreis auf dem Graph ist eine vollständige Messung.
Der P(u) Graph ging verloren, wird nachgeliefert.
.gif)
Viele Leute mögen Drehzahl-Angaben viel mehr als Leistung oder Strom. Wenn eine 14"x8" 5.500/min dreht, dann wissen sie sofort, das es gut zur Sache geht!
.gif)
Den letzten Graph benutze ich oft als kurze Überprüfung vor dem Flug. Man hat zu diesem Zeitpunkt keinen Zugang zum Strom und zur Spannung, um Leistung zu berechnen. Da ist eine einfache Drehzahlmessung mittels optischen Drehzahlmesser ganz hilfreich, um zu prüfen ob die Leistung in Ordnung ist.
.gif)
Dieser LRK350-20-11w ist schon ein scharfes Maschinchen. Bei nur 15 mOhm Wicklungswiderstand ist das Eta-Maximum sehr breit und hoch. Es soll ca 250 W bei 8 Zellen umsetzen können, ohne warm zu sein.
Dieser Motor wurde mit unterschiedlichen Aeronaut (a) und Graupner (g) LS mittels Data Logger vermessen. Die einzelnen Linie sind mit Zahlen, wie 14x08 versehen, um die Zuordnung zu erleichtern. Die Farben der Linien sind auf allen Graphs eines Motors gleich.
Jeder Kreis auf dem Graph ist eine vollständige Messung.
.gif)
und der Strom für jede LS:
.gif)
Viele Leute mögen Drehzahl-Angaben viel mehr als Leistung oder Strom. Wenn eine 14"x8" 5.500/min dreht, dann wissen sie sofort, das es gut zur Sache geht!
.gif)
Den letzten Graph benutze ich oft als kurze Überprüfung vor dem Flug. Man hat zu diesem Zeitpunkt keinen Zugang zum Strom und zur Spannung, um Leistung zu berechnen. Da ist eine einfache Drehzahlmessung mittels optischen Drehzahlmesser ganz hilfreich, um zu prüfen ob die Leistung in Ordnung ist.
.gif)
Hier ein Wiederholung der bekannten Zusammenhänge:
An den, durch eine LS, belasteten Motor legen wir eine Spannung Um. Durch ihm fliest ein Motorstrom Im. Die Luftschraube dreht mit n
Um - Motorspannung
Im - Motorstrom
n - Drehung der LS, oder Welle, wenn kein Getriebe
Jeden Elektromotor kann man bekannterweise mit einigen Zahlen die ihm spezifizieren, beschreiben. Dazu, unter anderen, gehören:
Io - Leerlaufstrom (meistens Linear mit der Spannung steigend)
Ri - Innere Resistenz, ziemlich konstant
Motor Ri in mOhm LRK350-20-15 36 LRK350-20-13 24 LRK350-20-11 15
Einige Messungen, die oben als Kurven gezeigt wurden, finden sich in der Tabelle wieder. Die wichtigste Spalte ist die no-kns. Ziemlich konstant für jeden der drei Motoren.
| Um | Im | U | I | n | ns | no |
| LRK 350-20-15 an 14x8 | kns | |||||
| 5.63 | 8.89 | 5.31 | 7.19 | 3154 | 594 | |
| 6.53 | 11.15 | 6.12 | 9.45 | 3566 | 582 | |
| 7.61 | 13.99 | 7.11 | 12.29 | 4054 | 571 | |
| 8.85 | 17.55 | 8.22 | 15.85 | 4560 | 555 | 627 |
| 10.21 | 21.34 | 9.44 | 19.64 | 5083 | 538 | |
| 11.59 | 25.69 | 10.67 | 23.99 | 5563 | 522 | -4.09 |
| LRK 350-20-15 an 14x9 | ||||||
| 6.60 | 12.85 | 6.14 | 11.15 | 3540 | 577 | |
| 7.17 | 14.47 | 6.65 | 12.77 | 3780 | 569 | |
| 8.00 | 17.04 | 7.39 | 15.34 | 4123 | 558 | |
| 8.86 | 19.84 | 8.15 | 18.14 | 4440 | 545 | 629 |
| 10.15 | 23.91 | 9.29 | 22.21 | 4903 | 528 | |
| 11.14 | 26.88 | 10.17 | 25.18 | 5237 | 515 | -4.26 |
| LRK 350-20-15 an 18x11 | ||||||
| 4.90 | 14.62 | 4.37 | 12.92 | 2503 | 572 | |
| 5.70 | 17.94 | 5.05 | 16.24 | 2786 | 551 | |
| 6.38 | 20.95 | 5.63 | 19.25 | 3026 | 538 | 635 |
| 7.44 | 25.69 | 6.52 | 23.99 | 3351 | 514 | |
| 8.30 | 29.60 | 7.23 | 27.90 | 3600 | 498 | -4.64 |
| LRK 350-20-11 an 14x7 | ||||||
| 7.00 | 23.16 | 6.64 | 20.76 | 5043 | 759 | |
| 7.56 | 26.09 | 7.16 | 23.69 | 5359 | 749 | |
| 7.88 | 27.39 | 7.46 | 24.99 | 5530 | 742 | |
| 8.18 | 28.97 | 7.73 | 26.57 | 5678 | 734 | 852 |
| 8.57 | 30.95 | 8.09 | 28.55 | 5870 | 726 | |
| 8.75 | 32.02 | 8.25 | 29.62 | 5973 | 724 | -4.05 |
| 8.84 | 32.53 | 8.34 | 30.13 | 5993 | 719 | |
| LRK 350-20-11 an 14x8 | ||||||
| 7.01 | 28.70 | 6.57 | 26.30 | 4855 | 739 | 852 |
| 7.50 | 31.86 | 7.01 | 29.46 | 5102 | 728 | |
| 7.79 | 33.44 | 7.27 | 31.04 | 5242 | 721 | -3.91 |
| LRK 350-20-13 an 14x8 | ||||||
| 5.00 | 12.39 | 4.70 | 10.39 | 3396 | 722 | |
| 6.00 | 16.58 | 5.60 | 14.58 | 3899 | 696 | |
| 7.00 | 21.12 | 6.49 | 19.12 | 4378 | 674 | |
| 8.00 | 26.01 | 7.38 | 24.01 | 4833 | 655 | 761 |
| 9.00 | 31.25 | 8.25 | 29.25 | 5266 | 638 | |
| 10.00 | 36.84 | 9.12 | 34.84 | 5674 | 622 | -4.08 |
| LRK 350-20-13 an 14x7 | ||||||
| 5.00 | 14.65 | 4.65 | 12.65 | 3301 | 710 | |
| 6.00 | 19.54 | 5.53 | 17.54 | 3786 | 684 | |
| 7.00 | 24.81 | 6.40 | 22.81 | 4243 | 662 | 764 |
| 8.00 | 30.45 | 7.27 | 28.45 | 4673 | 643 | |
| 9.00 | 36.48 | 8.12 | 34.48 | 5074 | 625 | -3.92 |
ns als Funktion des Motorstromes
ns(n,Im, ...) - Drehzahl pro Volt, abhängig von n selbst und Im etc
die ns(Im) wird berechnet als die Drehzahl pro Volt nach dem Abzug des Spannungsabfalles über der Ri.
U = Um - Im * Ri
ns(Im) = n / (Um - Im * Ri) = n / U
.gif)
Auf dem Graph wurde jeweils eine Trendlinie durch die Meßdaten bis zum Im=0 durchgezogen. Diese Trendlinie ist unabhängig von der benutzen LS (ob groß oder klein) aber abhängig von der Windungszahl. Interessanteweise ist die Neigung diese Linie immer ca -4.
W - eine Kennzahl des Motors unabhängig von der Windungszahl
Ich möchte eine neue Kennzahl eines Motors einführen. Sie ist nur von der Bauart des Motors abhängig, von dem Rotordurchmesser, Statorlänge, Luftspalt etc, aber nicht von der Windungszahl.
Das Produkt aus no=ns(0) und Windungszahl N ist für ein Motor konstant, unabhängig von der Wicklung und vom Drahtdurchmessers.
|
|
Für die 3 Motoren mit unterschiedlichen Wicklungen, aber gleichen Rotor, Stator ist die W-Zahl:
| Motor |
|
|
|
| LRK350-20-15 |
|
|
|
| LRK350-20-13 |
|
|
|
| LRK350-20-11 |
|
|
|
es scheint so, dass bei 12 mm Stator die Kennzahl auf ca 16.000 ansteigt und wieder bei einem 24 mm Stator auf ca 8.000 absinkt. Das werde ich untersuchen, sobald ich den 12 mm LRK untersucht habe. Alle Leser sind gebeten, mir Meßdaten zuzuschicken, damit wir ein erweitertes Modell bauen können. Vielleicht läßt sich auch der Durchmesser in die Gleichungen einbeziehen.
Wie man aus der Kennzahl einen Motor für eine bestimmte Aufgabe bewickeln kann wird in Wie viele Windungen braucht mein Motor? gezeigt.