Torquemax
wen hat's noch nicht gepackt ?
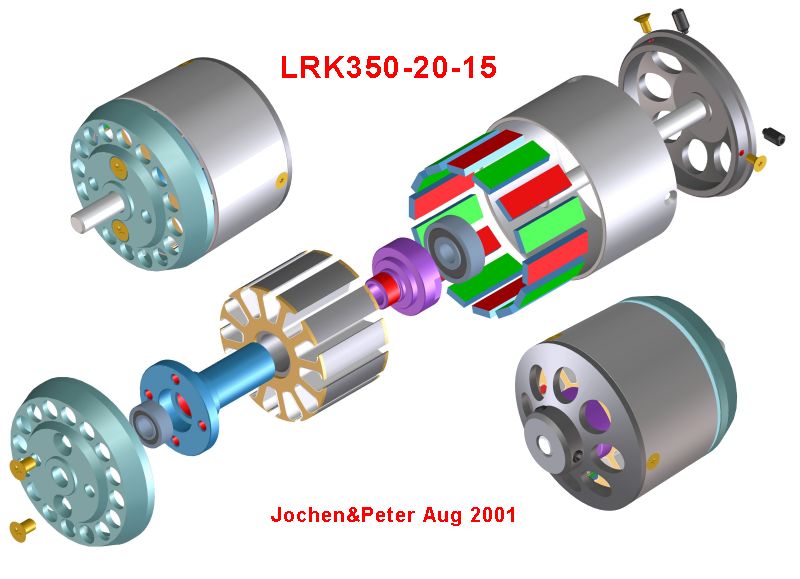
LRK350-20-15w
von Jochen und Peter,
Aug.2001
In Elektromodell 4/2000 hat Ludwig Retzbach eine fantastische
Idee von P.Zielinski und K.Schoepp aus Breslau vorgestellt: einen
Selbstbaumotor, den jeder versierte Bastler nachbauen kann. Die
Resonanz der Leser auf diesen Artikel war enorm und inzwischen
sind unzählige vom "LRK-Virus" befallen. Entsprechend
viele Nachbauten in unterschiedlichsten Variationen sind daraus
entstanden. In den Berichten in Elektromodell 1/2001 2/2001 und 3/2001 ging's dann weiter mit mehr Hintergrund-Informationen,
Tipps und Veränderungen. Ausserdem werden seit geraumer
Zeit sehr ausführliche Seiten im Internet veröffentlicht
.
Es gibt ständig rege Diskussion
über den Torquemax bei rconline
. Wenn man ins Torquemax-Geschäft einsteigen will, sollte
man diese Links
kennen.
Es war also nur eine Frage der
Zeit, bis ich mir die Frage stellte :
"Wann
baue ich mir einen starken 300-500W Motor für meinen E-Segler
?"
Motivation
Natürlich kann man heute
für viel Geld fast alles kaufen und auch Brushless-Aussenläufer
gibt's bei Actro und Plettenberg. Doch der Gedanke an einen Eigenbau-Motor,
der sich genau auf meine Bedürfnisse abstimmen lässt,
ist ein von mir schon lange gehegter Traum. Ausserdem noch von
den kreischenden Getrieben wegzukommen und trotzdem Luftschrauben
der Größe 14-17 Zoll direkt anzutreiben - Wow !
 Konstruktion Konstruktion
Vor genau 3 Wochen sprach ich
meinen Freund und Modellflieger Jochen darauf an, gab ihm alle
darüber erschienen Artikel und Internet-Links. Schon einen
Tag später war der Beschluss gefast: Wir entwerfen und bauen
unseren eigenen Torquemax. Er soll stabil und alltagstauglich
sein, souverän 350W umsetzen (kurzeitig 600W) und das Wichtigste
für Jochen: er soll im Rumpf Platz finden, damit die Optik
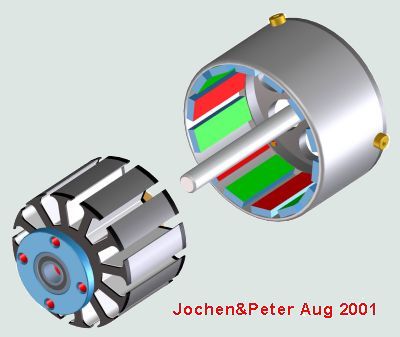
seiner Semi-Scale Modelle nichts einbüsst. Die Standard-Front-Bauweise
schied damit von vorn herein aus. Da sich die Magnetglocke hinter dem Motorspant
drehen soll, muss die Antriebswelle durch den Statorblock gehen. Um den harten Alltagsbelastungen zu
trotzen wurde die Welle auf 5mm dimensioniert (gehärteter
Zylinderstift), und der Abstand der beiden Kugellager maximiert,
ohne die Gesamtbaulänge zu vergrössern. Dies ist beim
Original-Torquemax nur unbefriedigend zu lösen - geringer
Lagerabstand bedeutet höhere Belastung der Lager (Lebensdauer)
und mehr Spiel zwischen Glocke und Stator (Vibrationen). Die Dimensionierung der
 Kugellager sollte bei uns stabiler
ausfallen, auch wenn das
mit Mehrgewicht von ca. 8g bezahlt werden muss. Da das hintere
Lager im Betrieb die Zugkräfte der Luftschraube aufzunehmen
hat, wurde es größer gewählt (16x5x5) als das
Vordere (11x5x4). Eine weitere wichtige Eigenschaft stand auf
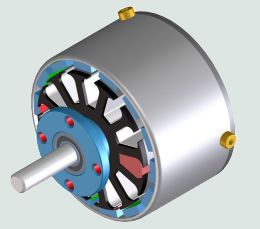
dem Wunschzettel: Der
Motor soll einfach in alle Einzelteile zerlegbar sein, um jederzeit Änderungen an der
Konstruktion vornehmen zu können und bei Reparaturen nur
die beschädigten Teile austauschen zu müssen. Nur die
Magnete werden in den Rückschlussring eingeklebt. So entstand
das Design
des verschraubten Stators, durch den die Antriebsachse nach vorne
geht. Da die Luftschraube
die Achse nach vorne zieht, also die Glocke noch mehr über
den Stator schiebt, entsteht keine Notwendigkeit, die Welle in
der axialen Richtung zu fixieren. Keine Angst, sie kann nach
hinten nicht herausrutschen, dafür sind die Magnete aus
den seltenen Erden viel zu stark. Es bedarf schon einiger Kraft
die Glocke vom Stator zu ziehen. Durch unsere Bauweise mit der
Hinter-Spant-Montage ergab sich - offen gesagt zufällig
- ein weiterer Vorteil. Sollte der E-Segler beim Landen oder
beim Transport einen Schlag auf die Nase bekommen, schiebt sich
die Glocke wie gefedert nach hinten, bis der LS-Aufnehmer auf
den Spant trifft und die Kraft aufnimmt. Der Motor bleibt ohne
Schaden. Kugellager sollte bei uns stabiler
ausfallen, auch wenn das
mit Mehrgewicht von ca. 8g bezahlt werden muss. Da das hintere
Lager im Betrieb die Zugkräfte der Luftschraube aufzunehmen
hat, wurde es größer gewählt (16x5x5) als das
Vordere (11x5x4). Eine weitere wichtige Eigenschaft stand auf
dem Wunschzettel: Der
Motor soll einfach in alle Einzelteile zerlegbar sein, um jederzeit Änderungen an der
Konstruktion vornehmen zu können und bei Reparaturen nur
die beschädigten Teile austauschen zu müssen. Nur die
Magnete werden in den Rückschlussring eingeklebt. So entstand
das Design
des verschraubten Stators, durch den die Antriebsachse nach vorne
geht. Da die Luftschraube
die Achse nach vorne zieht, also die Glocke noch mehr über
den Stator schiebt, entsteht keine Notwendigkeit, die Welle in
der axialen Richtung zu fixieren. Keine Angst, sie kann nach
hinten nicht herausrutschen, dafür sind die Magnete aus
den seltenen Erden viel zu stark. Es bedarf schon einiger Kraft
die Glocke vom Stator zu ziehen. Durch unsere Bauweise mit der
Hinter-Spant-Montage ergab sich - offen gesagt zufällig
- ein weiterer Vorteil. Sollte der E-Segler beim Landen oder
beim Transport einen Schlag auf die Nase bekommen, schiebt sich
die Glocke wie gefedert nach hinten, bis der LS-Aufnehmer auf
den Spant trifft und die Kraft aufnimmt. Der Motor bleibt ohne
Schaden.
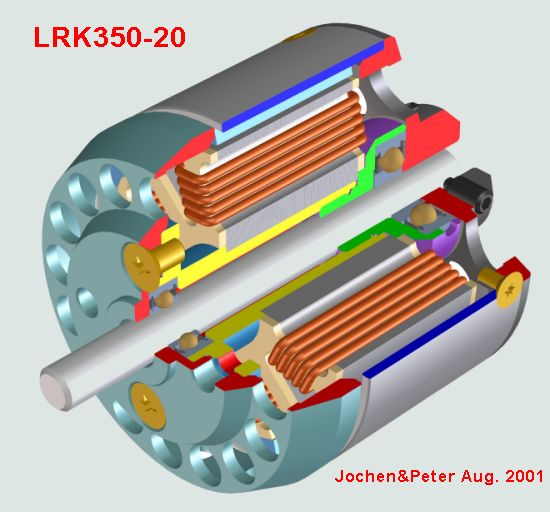
Vorne kam noch ein Schild zum
Schutz der Anschlüsse und Wicklung hinzu :
Schnittbild
Fertigstellung
Die Herstellung dieser wunderschönen
Teile war eine Meisterleistung, wie jeder es hier sehen kann.
Wir haben täglich noch kleine Details verändert, um
die Balance zwischen Gewicht und Robustheit zu wahren. Es war
keine leichte Aufgabe. Trotz der starken Kugellager und einiger
Teile mehr haben wir doch ein Gewicht von 185 g
vor der Bewicklung erreicht. Für ein Motor der 500W Klasse
kein schlechter Wert. Eine Gewichtstabelle ist hier. Abmessungen hier.
Hier einige Fotos vor dem Bewickeln:
  
Nach dem Bewickeln mit diesem Schema:
 |
Bis zu diesem Moment war ich
eher ein Zuschauer und Berater. Aber jetzt kam der Job für
den Elektriker! Die Berechnung der nötigen Windungen stand
an. Nach einigen Überlegungen entschied ich mich für
einen, um ca 10-20% langsamer drehenden Motor. Ich wollte unbedingt
die Ziel-Luftschrauben, aber auch übergrosse Luftschrauben
ausprobieren. Dem
LRK als Aussenläufer wird doch ein Durchzug von niedrigen
bis zum hohen Umdrehungen nachgesagt.
Da ich auch den schnell drehenden 2-pol Innenläufer AVEOX1010/2w
mit 4.4:1 an 14x9 LS und einen schnellen 2-pol MAXON Innenläufer
mit Getriebe 14:1 an Aeronaut 18x11 betreibe (Dauerflug), wollte
ich sehen, ob ein zu langsam drehender LRK nicht besser sein
kann als die kommerziellen Produkte. Der Vorteil des Torquemax:
er arbeitet ohne Getriebe, deren 8-15% Verluste entfallen also! |
BL-Controller
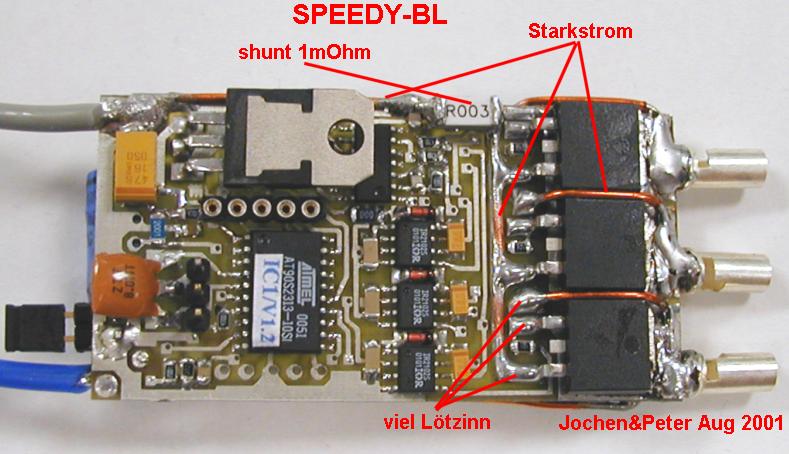
Für den schönen Motor
kam dann nur ein Controller in Frage: der SPEEDY-BL von Jo Aichinger , der von der Firma Megra als Bausatz vetrieben wird. Warum?
Ich wollte unbedingt die schöne Schaltung ausprobieren,
aber auch die "Vorzündung" des Motors fein einstellen
können. Über den Controller berichte ich hier. Drei andere käufliche BL-Controller dürfen
auch den Torquemax antreiben. Danke an Sebastian für die Leihgabe.
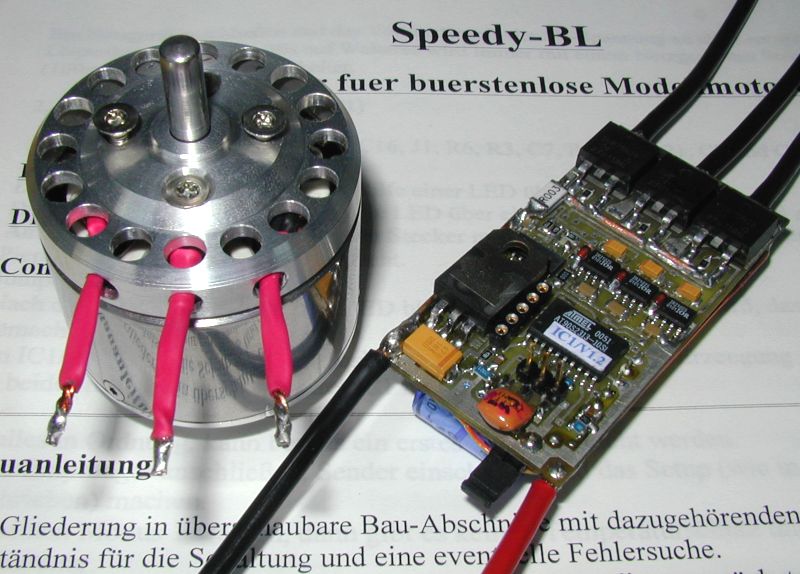
Hier nun das endgültige
Gespann: LRK350-20-15 (schon der Zweite) mit dem Speedy-BL.
Torquemax Messungen
 Das schöne an der ganzen Sache ist,
daß man doch ziemlich einfach so einen Motor vermessen
kann. Zwar werden wir demnächst auch das Drehmoment und
somit auch die mechanische Leistung messen können (Meßstand mit 14bit
AD-Wandlern und einen DataLogger),
aber nach dem Bewickeln machte ich den ganzen Tag Messungen in
allen möglichen Variationen an insgesamt 6 Luftschrauben.
Die Firma Aeronaut liefert für die Luftschrauben sogar die
100W-Kennzahl, so dass einige Effektivitätsberechnungen
durchgeführt werden konnten. Das schöne an der ganzen Sache ist,
daß man doch ziemlich einfach so einen Motor vermessen
kann. Zwar werden wir demnächst auch das Drehmoment und
somit auch die mechanische Leistung messen können (Meßstand mit 14bit
AD-Wandlern und einen DataLogger),
aber nach dem Bewickeln machte ich den ganzen Tag Messungen in
allen möglichen Variationen an insgesamt 6 Luftschrauben.
Die Firma Aeronaut liefert für die Luftschrauben sogar die
100W-Kennzahl, so dass einige Effektivitätsberechnungen
durchgeführt werden konnten.
Ich maß die Spannung mit
einem 0.1% Voltmeter, Strom über ein 2.5mOhm Shunt (4-Punkt-Messung)
und die Drehzahl indirekt über die Frequenz der MOSFET-Gate-Ansteuerung.
Der Vorteil dieser Methode ist, daß ich rpm (rounds per
minute) bis hinter dem Komma messen kann, also nicht auf die
Auflösung von 100 der üblichen optischen Drehzahlmesser
angewiesen bin. Da die Drehzahl der LS mit der dritten Potenz
in die Leistungberechnung eingeht ist eine 0.1% Genauigkeit angeraten
(und auch leicht zu erfüllen, da die Frequenz von 400 Hz
mit 0.4 Hz Genauigkeit leicht gemessen werden kann).
Die aufwendigen Messungen würden
hier den Rahmen sprengen. Es wurden für jede Luftschraube
bis zu 8 Arbeitspunkte vermessen und die spezifische Drehzahl/Volt
für jede Last berechnet. Daraus ergibt sich auch die Neigung
der ns-Linie, der sogenannte kns-Wert. Dieser Wert besagt wie
"steif" ein Motor in der Drehzahl ist. Das Ergebniss:
ns=480/V
bei 25 bis 30A, ca 300W
Dem Motor machte es nichts aus,
daß ich ihn manchmal minutenlang
bei 300W in der oben gezeigten
Halterung, ohne viel Kühlluft drehen ließ. Er blieb
viel kühler als der Ultra 1310-10 bei ähnlichen Torturen.
Ein Test bei 500W findet auf dem Meßstand statt. Die ganze
Messung wurde nur mit einem Ziel durchgeführt, die Windungszahl
für die zwei endgültigen Motoren zu bestimmen. Diese
sollen bei 8 und 10 Zellen eine Aeronaut 14x8 oder 14x9 bei 300W
antreiben. Das Resultat ist : 11 bzw. 13 Windungen.
Hier ein Beispiel aus dem Excel
Hier ist die Excel Arbeitsmappe mit allen
Tabellen und 9 Diagrammen hinterlegt. Es wurde auch die Vorzündungeinstellung
variiert und der Einfluss auf die Leistung des Motors vermessen.
Auch der Freilauf des Controllers im Teillast Bereich von 40%
wurde beurteilt. Führt man den Mauszeiger über die
Zellen, die rechts oben ein kleines rotes Eck haben, erscheint
ein Fenster mit Kommentaren und Erklärungen zur jeweiligen
Zelle. Hier
ist ein Program zur Auswahl der CAMcarbon LS.
Standschub
Der Standschub wurde in der ASW24, ausgestatett mit dem LRK350-20-13,
gemessen. Die LS war eine Aeronaut CAMCarbon 15x8. Der Akku 10
Zellen 2400mAh. Diagramme
und Tabelle hier.
Was
folgt ?
Wir haben vor noch weitere Motoren
dieses Types zu bauen. Die Konstruktion ist noch lange nicht
abgeschlossen und die praktischen Erprobungen werden weitere
Verbesserungen erfordern. Am Ende steht bestimmt ein brauchbares
Design, das wir bei ausreichender Nachfrage eventuell auch als
Baukasten anbieten könnten.
Wer
sind wir ?
 |
Jochen hat vor vielen Jahren
Feinwerktechnik an der FH Esslingen studiert und arbeitet hauptberuflich
als Konstrukteur an der Entwicklung von IC-Testern. Er hat, trotz
einiger Pausen, schon über 20 Jahre Modellbau-
Erfahrung und in früheren Zeiten auch Viertakt-Modellmotoren
konstruiert, entwickelt und gebaut. Inzwischen ist er
vernünftig geworden und betreibt nur noch Segelflug und
Elekroflug.
Das CAD System ist seine zweite Heimat - egal ob in 2D oder
3D. Aber auch die Arbeit an der Dreh- oder Fräsmaschine
lässt die Nächte manchmal kurz werden. |
 |
Peter
arbeitet in der gleichen Firma, aber in einer anderen Division.
Er entwickelt seit fast 20 Jahren Meßgeräte für
die Medizin, chemische Analityk, Weltraumforschung und zuletzt
für die optische Internet-Kommunikation. Er hat für
Max-Plack-Institut, NASA (Jupiter Sonde "Galileo"),
Hewlett-Packard Labs in Kalifonien etc. gearbeitet. Am wohlsten
fühlt sich Peter, wenn es was zu messen, zu rechnen und
zu entwickeln gibt, wenn er nicht gerade auf dem Flugfeld wieder
einen Superbart erwischt hat. Ausgiebig Fahrrad fahren (100km),
gehören genauso zu seiner Beschäftigung, wie LRK vermessen
und weiterentwickeln. |
|