PPM-Puls Störungen
bei Landeaunflug
Peter Rother Nov. 2001
Immer wieder habe ich bei meinem
E-Segler, bei Kreisen über der Wiese in 10-20m, den Motor
LRK350-12-24 angehen sehen. Die Ursache ist ziemlich gut bekannt.
Aufgrund der Interferenzen der direkten Welle und der, von der
Wiese mit 180 Grad reflektierenden Welle, entsteht am Model ein
Feldauslöschung. Diese Störung wollte ich einmal messen.
PPM-Frame
Die genaue Beschreibung des PPM-Frames befindet sich in meinem:
Hier nur das PPM-Frame:
Der Motor wird bei mir über den Kanal 3 gesteuert, sodaß ich an der Registrierung der Länge der Pulse am Ausgang 3, während eines langen Fluges, interessiert bin.
Meßinstrumente
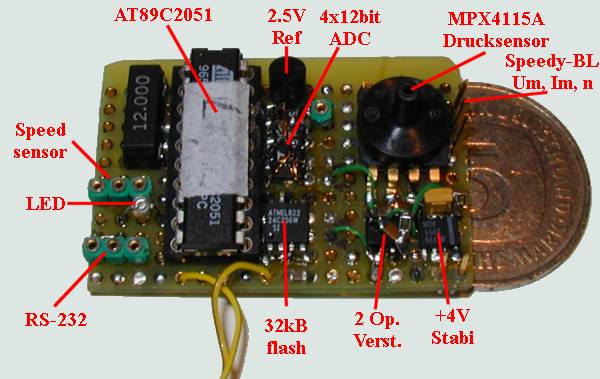
Um diese Meßaufgabe zu bewältigen habe ich meinen DataLogger mit einem PPM-Eingang versehen. Jede 22,5 ms wird der Puls mit 1 us genau gemessen. Vier solche Messungen werden aufaddiert, sodass ein Mittelwert über 90 ms entsteht. Dieser Wert wird in dem 32 kB EEPROM in einem Byte kodiert. Diese Aufsumierung und die Kodierung auf ein Byte sind notwendig um die Aufnahmezeit auf 49 Minuten auszudehnen, obwohl 32.768 Messpunkte gar nicht so wenig sind ! Würde ich jeden PPM-Puls speichern, wäre der Speicher nach 12 Minuten aufgebraucht. Würde man die Pulse auf 2 Bytes kodieren, wäre der Speicher nach 6 Minuten voll. Da ich doch meistens um die 45 Minuten fliege, war die erste Methode die Richtige.
Meßflug
Für so ein Meßflug soll man schon ein ruhiges Wetter suchen. Am Sonntag 18.11.2001 war es zwar kalt, aber fast windstill. Den zweiten Flug zeige ich hier. Das Model war ein 2,5 m Thermiksegler mit einem LRK350-12-24w-0.85mm ausgestattet. Diesen Segler hatte ich schon vorher im Fluge vermessen.
Ich wollte drei Punkte verwirklichen:
Nach dem kraftvollen Start mit Volllgast bin ich zuerst in einer normallen Entfernung geflogen. Erst nachdem meine Hilfsperson mit Walky-Talky angetroffen ist, haben wir einige Punkte in der Siedlung vereibart, wo ich dann per Funkhinweise, geleitet wurde.
Der gesammte Flug verlief in ca 200 m Höhe und wurde mittels Variometer ziemlich ruhig gesteurt. Die Entfernung, laut Stadtkarte, war in der Zeit zwischen 480 und 800 Sekunden 560 m und die Höhe 200 m, somit ca 600 m Luftlinie Entfernung.
Die kleinen Abweichungen von der Linie in der Teillast sind durch die Bewegung des Gasknüppels (Seitenruder) verursacht. Auch die Quantiesierung (nur 1 Byte) könnte hier zu sehen sein. Trotzdem sehen wir hier in dem Graph nicht weniger als 30.542 Meßunkte! Am Ende der Teillast musste ich den Gasknüppel doch vorschieben, da die Akkuspannung absank. Ich konstrolierte den Schwebeflug mittels des Varios.
Wie man hier erkennen kann, ausser zwei sehr kleinen Störungen bei ca t=2000s verlief der Flug in der normallen Höhen ohne Störungen. Wobei schon die kleinste Störung hier sichtbar wäre, da jede 0,0225 Sekunden eine Messung des PPM-Pulses geschah.
Sinkflug
Ab Ende der Teillast bin ich nur runter gesegelt. Bei t=2400 sieht man schon ganz deutliche Störungen des PPM-Pulses.
 |
 |
Die Störung um t=2404 s ist auf dem linken Bild gezeigt. Es handelt sich hier um Rauschen, dass entsteht wenn Wellen ausgelöscht werden. Es scheint, dass das Modell innerhalb von 2-3 Sekunden (15-24m) diese Stelle überflogen ist.
 |
Sehe oberes Bild bei t=2465s
Hier handelt sich um eine Punktstörung, die wahrscheinlich nichts mit der langsam aufsteigende Wellenauslöschung gemeinsam hat ! |
Landeanflug
Bevor ich auf diese Wiese lande, baue ich die Höhe in Kreisen ab. Die Höhe ist natürlich niedrig. Die Kreise sind in ca 50 m Entfernung. Ich habe schon immer bei bestimmten Stellungen das Angehen des Propellers beobachtet.
Auf diesem Bild ist sichtbar, dass ich kurz den Propeller starte, um gleich in den Leerlauf des Propellers (Wind milling) zu gehen. So bremse ich mein Modell, weil sonst würde es ausserhalb meines Landeplatzes gleiten. Der PPM-Puls unterhalb 1400 us ist also Prop-Bremse. In ca 60-70 m Entfernung, also in unmittelbare Nähe eine starke Störung, wegen der Wellenauslöschung. Eine Vergrösserung an der Stelle sieht folgend aus:
Hier auf dem Bild ist sichtbar, dass schon eine Filterung von 0,3 Sekunden diese Störung ausblenden würde. Das wird auch dem Programmierer des BL-Controllers empfohlen.